What is a Point Cloud?

What is a Point Cloud?
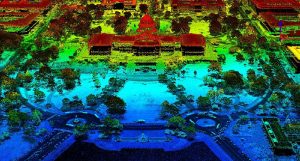
A point cloud is a collection of points for dynamically storing data commonly from LiDAR systems.
A liDAR is a sampling tool that sends over 160,000 pulses per second. Each 1-meter pixel contains about 15 pulses of light.
Once the LiDAR system collects each individual reading, the processed data becomes point cloud data.
And pulses of light represent the millions of point data in a point cloud.
READ MORE: A Complete Guide to LiDAR: Light Detection and Ranging
Point Cloud Attributes
Each point stores information (components) with multiple attributes that describe each point.
At the most basic level, attributes include X, Y, and Z coordinates. Each point is checked with GPS timestamps and inertial measurement units.
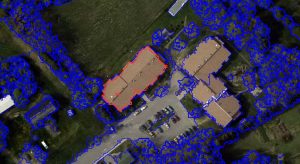
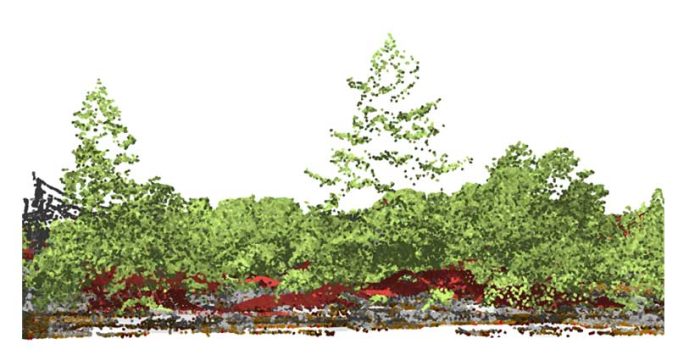
But point clouds can also store attribute information about the intensity, color, and time as well. When a LiDAR system scans the ground, the entire set of points is unclassified in regards to what they hit on the surface.
Automated routines assist in classifying point clouds. For example, classes can include ground, vegetation (low, medium, and high), building, water, etc. Sometimes, point classification may fall into more than one category.
LiDAR Formats

The most common file format to store point cloud data is a LAS file format. This binary file format maintains information specific to LIDAR without the loss of information.
LAS files are available for public use and are not a proprietary file format like ASCII. The dense networks of points are so large that LiDAR splits point data into several files.
When you compress a LAS file, the reduced file format becomes LAZ. By using this file format, you can save significant storage space without information loss.
Lastly, LAS Datasets (LASD) are a type of reference or pointer type of dataset specifically for Esri ArcGIS. Not only can you obtain 3D point properties, but you can also build triangulated surfaces and elevation models with LAS Datasets.