A Complete Guide to LiDAR: Light Detection and Ranging
LiDAR 101
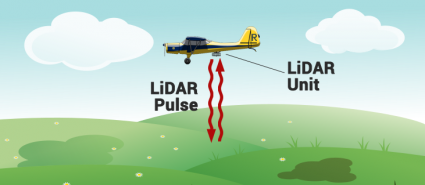
LiDAR is fundamentally a distance technology. From an airplane or helicopter, LiDAR systems send light to the ground.
This pulse hits the ground and returns to the sensor. Then, it measures how long it takes for the light to return to the sensor.
Recording the return time is how LiDAR measures distance. In fact, this is also how LiDAR got its name – Light Detection and Ranging.
LiDAR (Light Detection and Ranging) works by emitting laser pulses and measuring the time it takes for the reflected light to return.
How LiDAR Works
LiDAR is a sampling tool. What I mean by that is that it sends over 160,000 pulses per second. For every second, each 1-meter pixel gets about 15 pulses. This is why LiDAR point clouds create millions of points.
LiDAR systems are very accurate because it’s being controlled in a platform. For example, accuracy is only about 15 cm vertically and 40 cm horizontally.
As a plane travels in the air, LiDAR units scan the ground from side to side. While some pulses will be directly below at nadir, most pulses travel at an angle (off-nadir). So when a LiDAR system calculates elevation, it also accounts for the angle.
Typically, linear LiDAR has a swath width of 3,300 ft. But new technologies like Geiger LiDAR can scan widths of 16,000 ft. This type of LiDAR can cover much wider footprints compared to traditional LiDAR.

What Can LiDAR Generate?
1. Number of Returns
Imagine you’re hiking in a forest. Then, you look up to the sky. If you can see light, this means that LiDAR pulses can go through too. Also, this means that LiDAR can hit the bare Earth or short vegetation.

A significant amount of light penetrates the forest canopy just like sunlight. But LiDAR won’t necessarily only hit the bare ground. In a forested area, it can reflect off different parts of the forest until the pulse finally hits the ground.
By using LiDAR to get bare ground points, you’re not x-raying through vegetation. Instead, you’re really peering through the gaps in the leaves. When it hits the branches, you get multiple hits or returns.
2. Return Number
In a forest, the laser pulse goes downwards. When light hits different parts of the forest, you get the “return number”. For example, you’ll get the 1st, 2nd, and 3rd returns until it finally hits the bare ground. If there’s no forest in the way, it will just hit the ground surface.
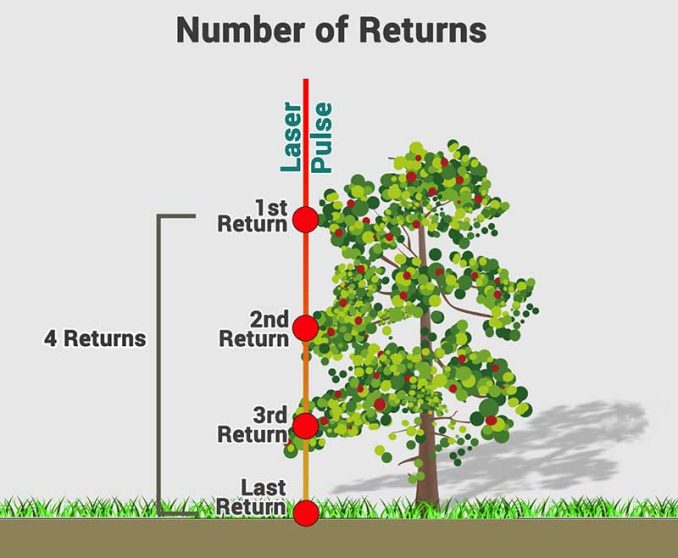
Sometimes a pulse of light doesn’t reflect off one thing. As with the case of trees, one light pulse could have multiple returns. LiDAR systems can record information starting from the top of the canopy through the canopy all the way to the ground. This makes LiDAR valuable for interpreting the forest structure and shape of the trees.
3. Digital Elevation Models
Digital Elevation Models (DEM) are bare earth (topographic) models of the Earth’s surface. By using only ground returns, you can build a DEM. But this is different from Digital Terrain Models (DTM) because DTMs incorporate contours.
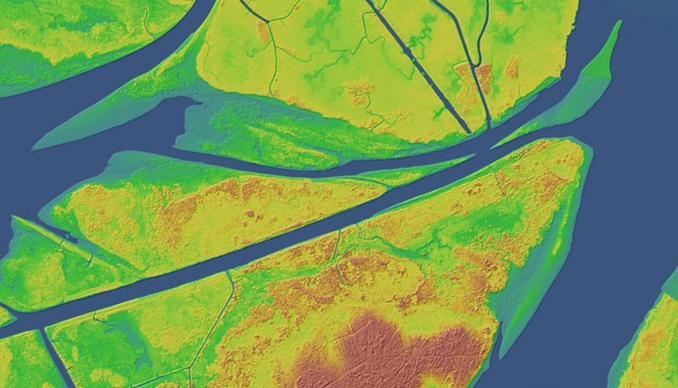
By using a DEM, you can generate additional products. For example, you can create:
- Slope (rise or fall expressed in degrees or percent)
- Aspect (slope direction)
- Hillshade (shaded relief considering illumination angle)
READ MORE: Free Global DEM Data Sources
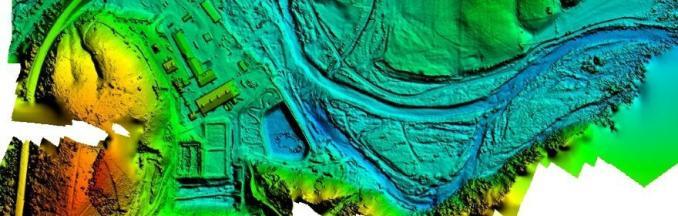
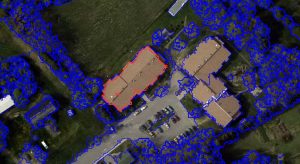
4. Digital Surface Models
As you’ve learned, LiDAR peers through the forest. Eventually, the light reaches the ground. Then, we get a bare Earth return. But what about the first return that hits the tree?
A Digital Surface Model (DSM) incorporates elevation from natural and built surfaces. For example, it adds elevation from buildings, tree canopies, powerlines, and other features.
5. Canopy Height Model
Canopy Height Models (CHM) give you the true height of topographic features on the ground. We also call this type of elevation model a Normalized Digital Surface Model (nDSM).
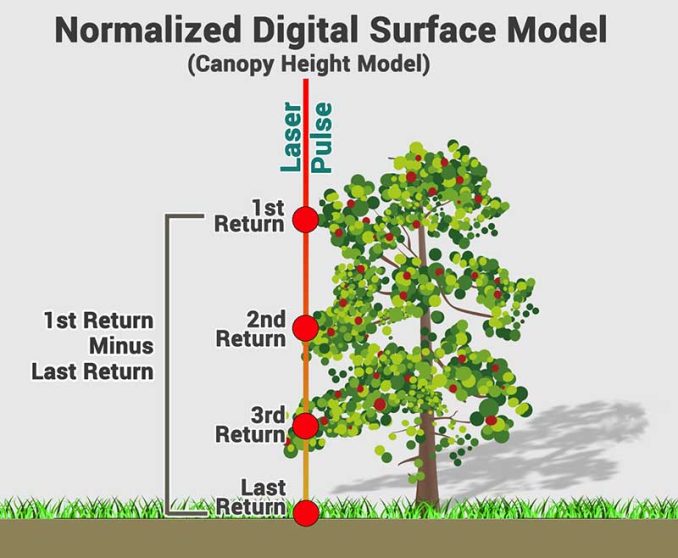
First, take the DSM which includes natural and built features like trees and buildings. Next, subtract these elevations from the bare Earth (DEM). When you subtract the two, you get a surface of features that represents real height from the ground.
6. Light Intensity
The strength of LiDAR returns varies with the composition of the surface object reflecting the return. The reflective percentages are referred to as LiDAR intensity.
But several factors affect light intensity. For example, range, incident angle, beam, receiver, and surface composition (especially) influence light intensity. An example is when the pulse is tilted further away, the return energy decreases.
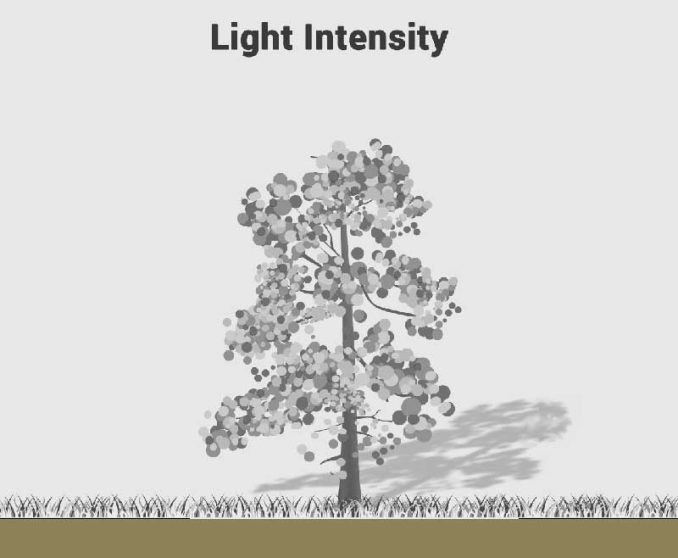
Light intensity is particularly useful in distinguishing features in land use/cover. For example, impervious surfaces stand out the most in light intensity images. This is why light intensity is good for image classification like object-based image analysis.
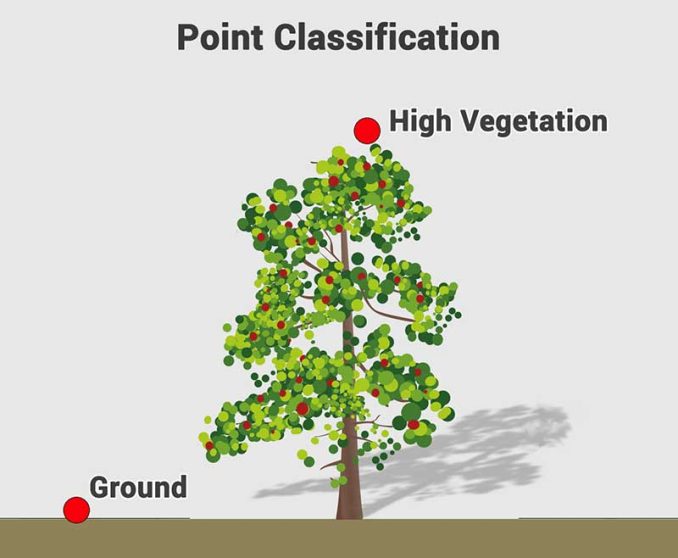
7. Point Classification
There are a set of classification codes that the American Society for Photogrammetry and Remote Sensing (ASPRS) assigns for LiDAR point classification.
For example, classes can include ground, vegetation (low, medium, and high), building and water, etc. Sometimes, point classification may fall into more than one category. If this is the case, vendors usually flag these points with secondary classes.
Vendors may or may not classify LiDAR. The codes are generated by the reflected laser pulse in a semi-automatic way. Not all vendors add this LAS classification field. Actually, it is usually agreed upon in the contract beforehand.
Where are open and free LiDAR sources?
LiDAR data is a rare, precious resource. But thanks to open data programs, they are becoming more widely available.
So where is the LiDAR data? Here is a list of the top 6 free LiDAR data sources for you to get a jump-start on your search.
If you can’t find what you’re looking for, then most likely you will have to purchase LiDAR data. Vendors generally fly LiDAR commercially by helicopter, airplane, and drone.

What are the types of LiDAR?
Let’s explore the types of LiDAR systems. They differ in:
- Size of footprint
- Wavelength
- Positional alignment
Profiling LiDAR
Profiling LiDAR was the first system ever used back in the 1980s. It specialized in straight-line features such as power lines. Profiling LiDAR sends out an individual pulse in one line. At a fixed nadir, it measures height along a single transect.
Small Footprint LiDAR
Small footprint LiDAR is what we mostly use today. It scans at about a 20 degrees scan angle. Then, it moves backward and forwards. If it goes beyond 20 degrees, the LiDAR instrument may start seeing the sides of trees instead of straight down.
- Topographic LiDAR maps the land typically using near-infrared light.
- Bathymetric LiDAR uses water-penetrating green light to measure seafloor and riverbed elevations.
Large Footprint LiDAR
Large footprint LiDAR uses full waveforms with a 20m footprint. But it’s accuracy is low because the pulse return can include sloping terrain. Two notable experiments from NASA used this type of LIDAR:
- SLICER (Scanning Lidar Imager of Canopies by Echo Recovery)
- LVIS (Laser Vegetation Imaging Sensor)
Ground-based LiDAR
Ground-based LiDAR sits on a tripod and scans the hemisphere. It’s particularly good for scanning buildings. But there are also applications in geology, forestry, and construction.
Geiger-mode LiDAR
Geiger-mode LiDAR is still in an experiential state. But it specializes in high-altitude scanning. Because it has an extremely wide swath, it can cover more ground compared to other types of LiDAR.
LiDAR system components
There are 4 main parts of an airborne LiDAR. They work together to produce highly accurate, usable results:
LiDAR SENSORS: As the airplane travels, sensors scan the ground from side to side. The pulses are commonly in green or near-infrared bands.
GPS RECEIVERS: GPS receivers track the altitude and location of the airplane. These tracks are important for accurate terrain and elevation values.
INERTIAL MEASUREMENT UNITS (IMU): As airplanes travel, IMUs track their tilt. LiDAR systems use tilt to accurately measure the incident angle of the pulse.
DATA RECORDERS: As LiDAR scans the surface, a computer records all of the pulse returns. Then, these recordings get translated into elevation.
Full Waveform vs Discrete
LiDAR systems store LiDAR returns in two ways:
- Discrete LiDAR
- Full waveform
Discrete LiDAR
Imagine LiDAR pulses scanning through a forested area. You get 1st, 2nd, and 3rd returns because the pulse hits multiple branches. Then, you get a large and final pulse by the bare ground return.
When you record the data as separate returns, this is a “discrete return LiDAR”. In short, discrete LiDAR takes each peak and separates each return.
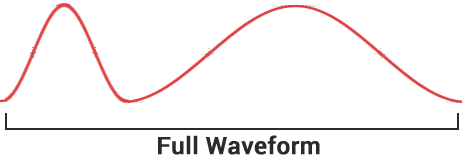
Full Waveform LiDAR
When you record the whole return as one continuous wave, this is full-waveform LiDAR. So, you simply count the peaks, this makes it discrete.
Even though full-waveform data is more complicated, LiDAR is moving towards a full-waveform system.
LiDAR Projects and Applications
This list of LiDAR uses and applications barely scratches the surface. For example, here are some ways how we use LiDAR today:
FORESTRY: Foresters use LiDAR to better understand tree structure and shape.
SELF-DRIVING CARS: Self-driving cars use LiDAR scanners to detect pedestrians, cyclists, stop signs, and other obstacles.
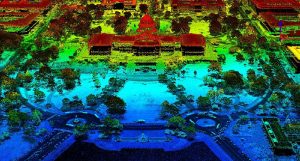
ARCHAEOLOGY: Archaeologists use LiDAR to find square patterns in the ground, which were ancient buildings and pyramids built by Mayan civilizations.
HYDROLOGY: Hydrologists delineate stream orders and tributaries from LiDAR.
READ MORE: 100 Earth-Shattering Remote Sensing Applications & Uses
Radar vs LiDAR
Radar and LiDAR are both technologies used for mapping environments. Similar to LiDAR, radar emits radio waves that bounce off objects and return to the radar system. Finally, radar uses the time it takes for the waves to return to calculate the distance.
But the main difference is that synthetic aperture radar is now becoming more mainstream in remote sensing. While synthetic aperture radar operates at an angle, LiDAR is straight-down.
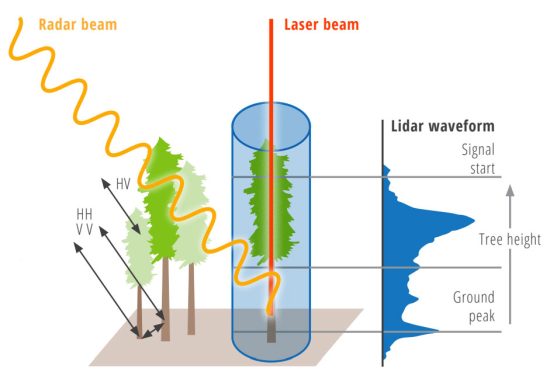
The side-looking geometry of SAR allows the radar to capture a wider area of the ground as it moves along its flight path. Because it emits pulses at an angle, SAR can use the motion of the platform to simulate a much larger antenna or aperture, leading to higher resolution images. Also, check out our comparisons of LiDAR with photogrammetry.
Summary: What is LiDAR?
How would you like to wave your magic wand and all of a sudden find out how far everything is away from you?
No magic wands were necessary. This is how LiDAR (Light Detection and Ranging) works. Of course, without the magic wand!
Light Detection and Ranging (LiDAR) uses lasers to measure the elevation of features. It’s a distance technology that samples with an incredible amount of accuracy and points.
It’s similar to sonar (sound waves) or radar (radio waves) because it sends a pulse and measures the time it takes to return. But LiDAR is different than sonar and radar because it uses light.
We’ve summarized light detection and ranging with this LiDAR guide. Any questions? Please let us know with a comment below.


Great information. Any recommendations on what to read to learn more about advanced topics in Lidar and point cloud processing?
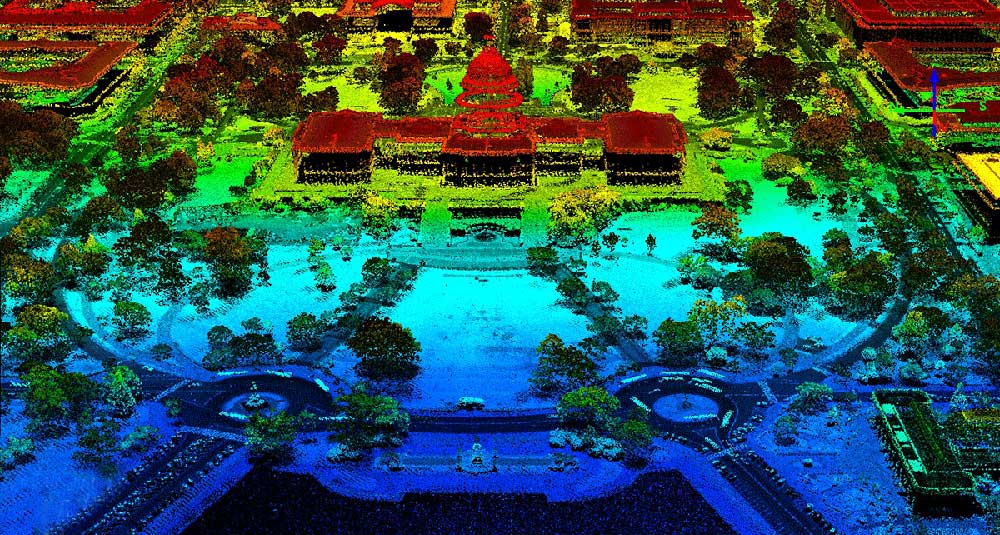
What software was the first image created with?
Thanks
You can create that with something like ArcGIS Pro. Even QGIS 3 would do the trick.
1. [How does LiDAR work?] I guess you mean ERROR is only about 15 cm vertically and 40 cm horizontally.
2. [4. Digital Surface Models] This figure for this section is not a DSM but part of a high-resolution satellite image. It would be better to change it.
Thanks for this great article for introducing LiDAR.
Quality content
Very nice write-up, I keep coming to your blog because it makes a lot of sense, please keep up the good work…….
Good information but could you recommend a website on how to read a lidar map? I have one of my property but need to understand what I’m looking at because I have caves and need to know where they are.
Could you recommend a guide to obtain the best vertical results in the forestry area? Also, a guide to calculate the best elevation.
Larry Schwartz – these “images” are caprured using a LiDAR system mounted on a tripod. The building is scanned inside and out and the point clouds merged. This is becoming very popular for BIM applications.
Therese Reinsch – when the LiDAR system collects the data, point cloud, all the LiDAR data points are unclassified as to what they are hitting. There are automated classification routines in TerraScan, however the routines need to be developed according to each application. Remember, the point cloud is 3D – you will be able to distinguish between tress and shrub as in quantity, but if you need total canopy coverage, ask the service provider to classify the point clouds in some basic classes, like house, road, sidewalk, tree, shrub, etc…. then the data can be used by other departments.
Susan M – LiDAR does not penetrate the ground. However airborne IFSAR oe InSAR will in either the P or L bands. The penetration is best on dry solis, like sand. The size of detection is quite large, so finding buried buildings is ok, but bones … you need GPR.
Trish, the LiDAR pulse starts out at about .3 milliradians at 1M, so the flying height will determine the spot size on the ground. Like a flashlight … hold it close to the floor the spot is small, hold it at shoulder height it is much larger.
I am curious about the width of the lidar/laser beam. Is the width of the beam very small like a laser pointer, all the way from the airplane to the ground? Or does the width of the beam get very large (e.g., 1 foot) by the time it hits the ground?
How deep under the ground can Lidar detect buildings or human skeletons? Could it find the skeletons of the 50,000 man army of the Persian king and Egyptian pharaoh Cambyses that was swallowed up by a sandstorm in the Sahara Desert in western Egypt southeast of Siwa in 523 BC? The skeletons of the soldiers may be buried deeply under sand. Thank you.
From what I’ve read, the best option is ground penetrating radar (GPR). In some types of soils, the depth of penetration averages about 5 meters.
https://www.sciencedirect.com/science/article/pii/S0016706107001607
My Municipality is currenty undertaking a lidar survey to determine urban tree loss in relation to development. Over half of the residents in this municipality agree that the tree canop is just about right and a tree bylaw introduced to protect mature trees should be enacted. Most developers clear lots and then plant shrubs or sapings to fulfill what they perseve as green infrastructure. The result of this lidar study will determine whether or not trees of 20 cm at DBH should be preserved to help mitigate climate change, stabalize the hillsides, etc. A quick look out my window has the answere but the municplaity requires scientific evidence to move froward on a tree bylaw. Will lidar provide this information? Will shrubs appear as “trees”? Will lidar distinguish between living and dead trees? What expertise is required t interpret results? I know that these are a lot of queations and I appreciate your answer.Thank you for your information and yur time.
I’ve seen “ghostlike” images on tv shows about airports and cathedrals. These seem to look through and object to locate points on its (otherwise) hidden side and give us pseudo-3D images. How is this done? Scan the object from both sides and coordinate in the computer?
Possibly. I am not too sure how they did it on that particular show. But I’ve heard of radio waves, x-rays and even Wi-FI from researchers at MIT for “seeing through walls”. I’ve never heard of LiDAR doing this before.
Really good article, thanks for putting together so many info sets into one piece! Easy read and easy to understand. One way to make it better is to add in citations for general us to learn more on the subject.
Nice article in layman terms. It could benefit from information on the typical resolutions and measurement units of LIDAR point records.
Thank you for describing well. Now I can understand it fully.
what is the scan rate and the type of mechanism used in the topographical LIDAR units?
Good explanation. Please more light on application of LiDAR in infrastructure development.
A very good article. Easy to understand.
Thank you for the easy representation with well covered points. Thanks
Are there any short range versions of lidar? Say for mapping a surface that is 4’x4′ but of varying height?
Nice overview.
However, lidar is not an acronym, though it was invented as a parallel to radar & sonar.
This is definitely one of the better LIDAR articles out on the web. You did an excellent job describing it so the average person could understand it.
This is perfect because I am writing a school paper on the LiDAR RADAR!
Really good article. Many Thanks.